
Use Teammaker to form your team. You can log in to that site to indicate your partner preference. Once you and your partner have specified each other, a GitHub repository will be created for your team.
In this lab we will apply deep Q-Learning to two reinforcement learning problems. We will use problems provided by Gymnasium (formerly known as Open AI gym).
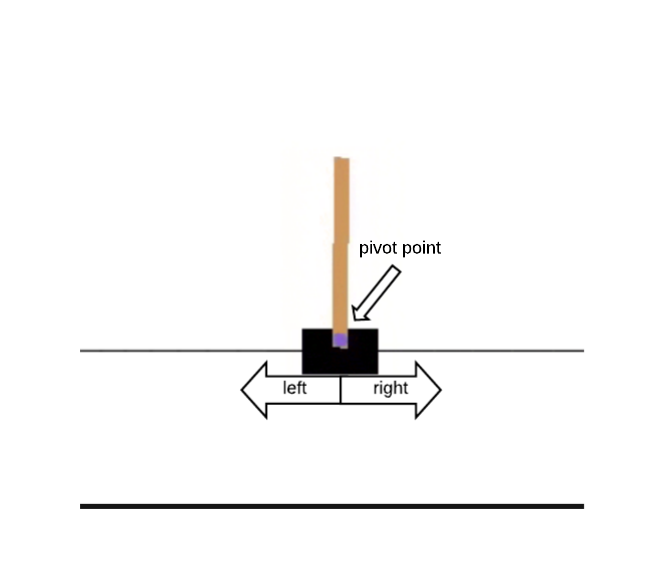
To start, we will focus on a classic control problem known as the Cart Pole. In this problem, we have a pole attached to a cart and the goal is the keep the pole as close to vertical as possible for as long as possible. The state for this problem consists of four continuous variables (the cart position, the cart velocity, the pole angle in radians, and the pole velocity). The actions are discrete: either push the cart left or right. The reward is +1 for every step the pole is within 12 degrees of vertical and the cart's position is within 2.4 of the starting position.
Once you've successfully been able to learn the Cart Pole problem, you will tackle a harder problem called Lunar Lander.
Open the file testGym.py and review how to create an gym environment, run multiple episodes, execute steps given a particular action, and receive rewards.
In order to use gymnasium, you'll need to activate the CS63 virtual environment. Then you can execute this file and watch the cart move and see example state information:
source /usr/swat/bin/CS63env
python3 testGym.py
Try the other environment, the lunar lander, which was initially commented out.
NOTE: this program tries to open a graphical window for output, which means it won't work over a remote connection without doing some extra work. You can effectively disable the display by changing the constructor parameter `render_mode` to have the value "rgb_array", which will make it at least run, though it's hard to actually evaluate its performance this way. It's also possible to set up X-forwarding so the graphical window is rendered remotely, though even if you get it configured properly this tends to be excruciatingly slow, so it's not recommended.
Generally, it's recommended to debug this program while actually sitting at a lab machine so you can see what it's doing.
Make sure you understand how this program works before moving on.
Recall that in deep Q-Learning we represent the Q-table using a neural network. The input to this network represents a state and the output from the network represents the current Q values for every possible action.
Open the file deepQCart.py. Much of the code has been written for you. This file contains the definition of a class called DeepQAgent that builds the neural network model of the Q-learning table and allows you to train and to use this model to choose actions. You should read carefully through the methods in this class to be sure you understand how it functions.
There are two methods that you need to write train and test. The main program, which calls both of these functions, is written for you and is in the file cartPole.py.
Here is pseudocode for the train function:
initialize the agent's history list to be empty
loop over episodes
reset the environment and get the initial state
state = np.reshape(state, [1, state size])
every 50 episodes save the agent's weights to a unique filename
(see program comments for details on this filename)
initialize total_reward to 0
loop over steps
choose an action using the epsilon-greedy policy
take the action, saving next_state, reward, and done
update total_reward based on most recent reward
reshape the next_state (similar to above)
remember this experience
reset state to next_state
if episode is done
break
add total_reward to the agent's history list
print a message that episode has ended with total_reward
if length of agent memory > batchSize
replay batchSize experiences for batchIteration times
if epsilon > epsion_min
decay epsilon
save the agent's final weights after training is complete
The test function is similar in structure to the train function, but you should choose greedy actions and also render the environment to observe the agent behavior. You should not remember experiences, replay experiences, decay epsilon nor save weights.
To run this program for training with 200 episodes do:
python3 cartPole.py train 200
Remember that you will first need to activate the CS63env
in the terminal window where you run the code. Deep Q learning
should be able to find a successful policy in 200 episodes using the
parameter settings provided in the file.
After training is complete, it is interesting to go back and look at the agent's learning progress over time. We can do this by using the weight files that were saved every 50 episodes.
To run this program in testing mode do:
python3 cartPole.py test CartPole_episode_0.h5
This would show you how the agent behaved prior to any training at
episode 0. The next command would show you the behavior after 50
episodes of training.
python3 cartPole.py test CartPole_episode_50.h5
The file CartRewardByEpisode.png contains a plot of reward over
time which also gives you a sense of the agent's progress on the
task. This is always displayed at the end of training. You can also
view this file by doing:
eog CartRewardByEpisode.png
Do not move on to the next section until you have successfully
learned the Cart Pole problem.
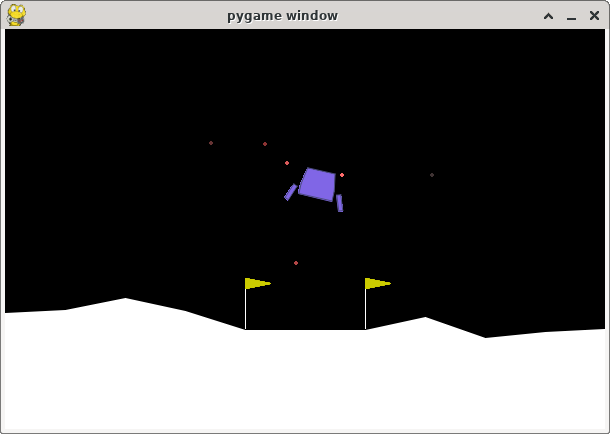
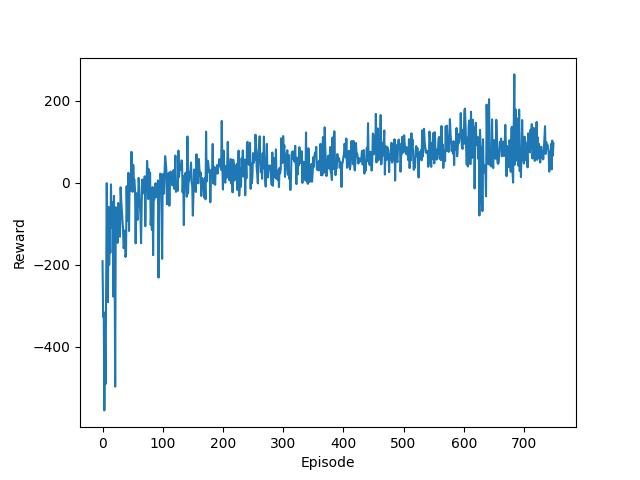
You will now try applying the same approach to a new problem called Lunar Lander (pictured below left). This is a harder problem and will take many more episodes to learn. For example, the graph of reward by episode (pictured below right), shows that even after 750 episodes, reward is still increasing.
As we have discussed in class, determining the appropriate settings for all of the hyperparameters in a machine learning system is a non-trivial problem. Luckily, Xinli Yu has written a paper entitled Deep Q-learning on Lunar Lander Game which systematically explores the possible settings for each of the key hyperparameters in this problem.
The structure of the Q-learning algorithm is based on code provided at Deep Q-Learning with Keras and Gym